
Mathematics, 25.01.2022 18:00 iris7324
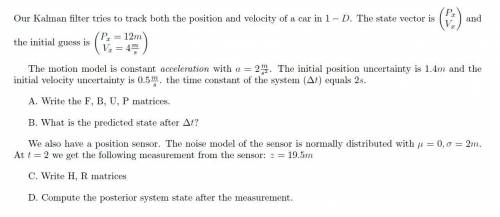
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector is
Px
Vx
and
the initial guess is
Px = 12m
Vx = 4m
s
The motion model is constant acceleration with a = 2m
s2 . The initial position uncertainty is 1.4m and the
initial velocity uncertainty is 0.5m
s . the time constant of the system (Δt) equals 2s.
A. Write the F, B, U, P matrices.
B. What is the predicted state after Δt?
We also have a position sensor. The noise model of the sensor is normally distributed with μ = 0, σ = 2m.
At t = 2 we get the following measurement from the sensor: z = 19.5m
C. Write H, R matrices
D. Compute the posterior system state after the measurement.
2

Answers: 3
Another question on Mathematics
Mathematics, 21.06.2019 23:30
Petes dog weighed 30 pounds it then lost 16% of it's weight how much did pete lose
Answers: 2
Mathematics, 22.06.2019 01:00
Which of the following domains provide a real value periods
Answers: 3
Mathematics, 22.06.2019 06:00
Iwas absent when my class learned this and my teacher is to lazy to teach it to me explain this to me .
Answers: 1
You know the right answer?
Our Kalman filter tries to track both the position and velocity of a car in 1 −D. The state vector i...
Questions


History, 01.09.2019 07:10

Biology, 01.09.2019 07:10

Spanish, 01.09.2019 07:10

Biology, 01.09.2019 07:10

Social Studies, 01.09.2019 07:10
History, 01.09.2019 07:10
Mathematics, 01.09.2019 07:10

Chemistry, 01.09.2019 07:10
Mathematics, 01.09.2019 07:10
Mathematics, 01.09.2019 07:10
Chemistry, 01.09.2019 07:10



